SLAM_在英伟达JetsonTX1上运行带有GPU加速的ORB-SLAM2+ROS_优质项目实战_毕业设计
”robotics ros slam orb-slam2 visual-slam ros-kinetic orbslam2 ros-melodic C “ 的搜索结果

这是用于单目、立体和RGB-D相机的 ORB-SLAM2 实时 SLAM 库的 ROS 实现,用于计算相机轨迹和稀疏 3D 重建(在具有真实比例的立体和 RGB-D 情况下)。 它能够实时检测环路并重新定位相机。 此实现删除了穿山甲依赖项和...
本文主要包括Ubuntu20.04系统下,并已安装对应的ROS-noetic机器人系统,在此基础上如何一步步安装ORB-SLAM2的依赖库,比如OpenCV,Eigen3,Pangolin,最后安装非ROS版本和ROS版`的ORB-SLAM2,以及安装过程中遇到的...
matlab的egde源代码SFM-AR-Visual-SLAM 视觉SLAM 葛兰素史克 支持基于特征或直接方法的通用SLAM框架,可以处理不同的传感器,包括单眼相机,RGB-D传感器或任何其他输入类型。 OKVIS:打开基于关键帧的视觉惯性SLAM ...
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达作者丨小深来源丨深话AI本文总结了特征点法SLAM中目前效果最好的方法:ORB-SLAM2 / ORB-SLAM3 相关改进代码汇总,...

文章参考部分开源代码和报错文章。
这个是我配置的window版本的ORB-SLAM2,使用vs2017编译,所有第三方的依赖库(包括opencv)全部已经部署在工程目录下,属性表的路径、运行环境都已经配置为相对路径,工程可以直接打开编译运行。有问题请到该代码的...
... 在博文<ORB-SLAM2编译安装>中,我们编译安装了ORB-SLAM2,也运行了其自带的ROS例程。但是该ROS程序基于rosbuild编译,而我们现在更多的使用catkin,参考作用有限。这篇文章记录了基于ROS调用ORB-S...

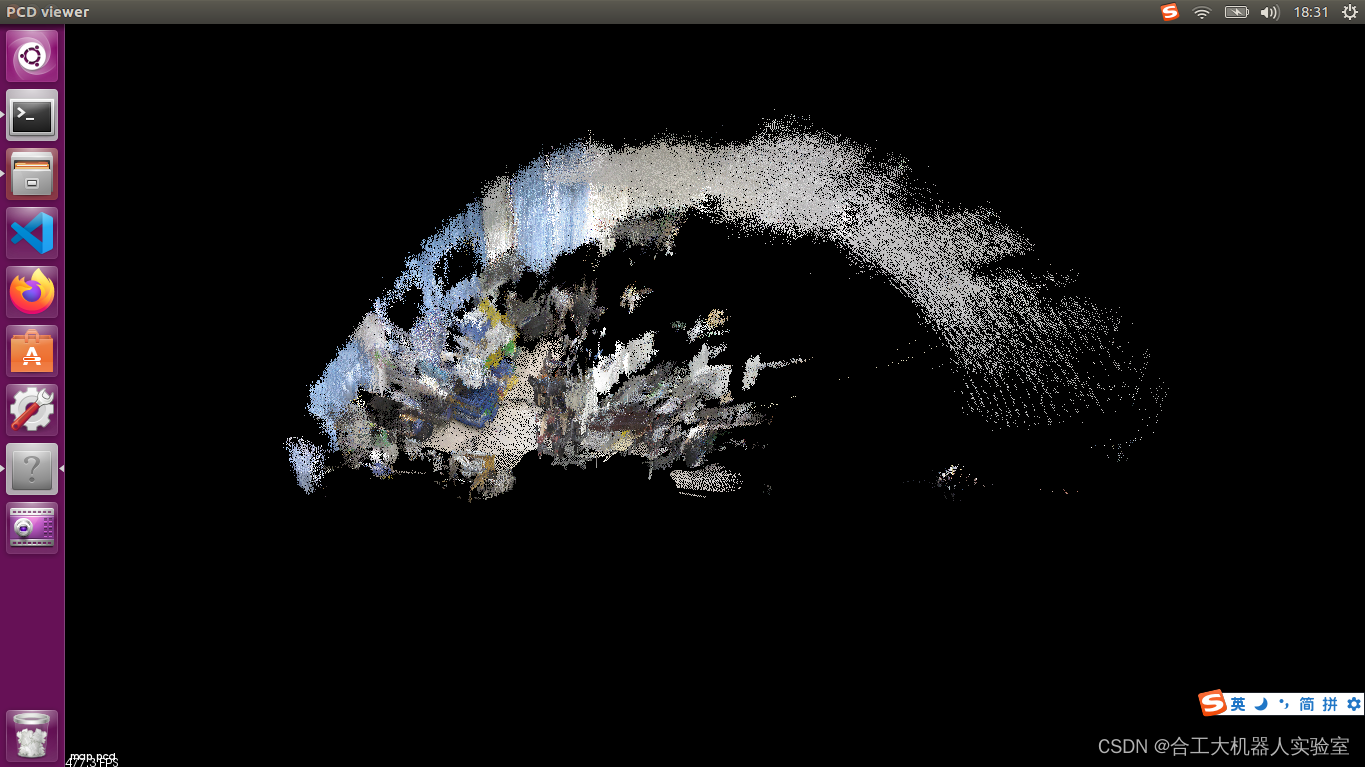
在./orbslam2_ws下source ./devel/setup.bash,然后运行roslaunch ORB_SLAM2 orbslam2.launch可以得到相同的效果。如果进行了滤波处理,可以修改double resolution = 0.00000001,修改后颜色显示正常,但存在明显的...
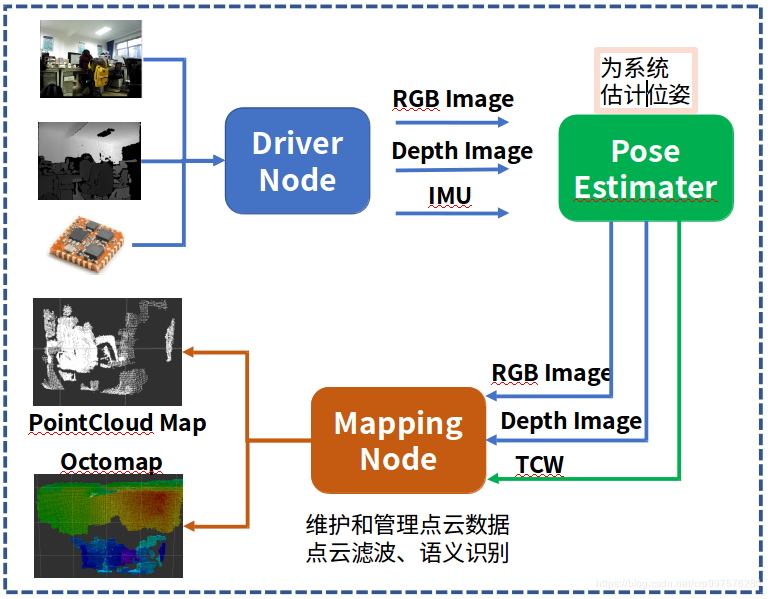
实际ROS视觉SLAM工程落地时,一般搭配传感器实时发出位姿pose的rostopic,本篇就以D435i相机的双目IR相机作为输入,运行ROS版ORB-SLAM2,最后发出pose的rostopic。
Visual-GPS-SLAMThis is a repo for my master thesis research about the Fusion of Visual SLAM and GPS. It contains the thesis paper, code and other interesting data.The website that accompanies this ...

ekf_slam:EKF-SLAM高级项目的ROS节点


介绍ORB-SLAM、ORB-SLAM2和ORB-SLAM3的一些特点,汇总3个ORB-SLAM的论文和github地址。最后选择ORB-SLAM2进行安装测试。


ORB-SLAM2-VINS-Fusion GitHub链接:https://github.com/HKUST-Aerial-Robotics/VINS-Fusion/tree/master/orb_slam2。ORB-SLAM2-Map-Merging GitHub链接:https://github.com/Owen-Liuyuxuan/ORB_SLAM2-Map-Merging...


ORB-SLAM2 ROS运行
标签: slam



推荐文章
- 机器学习之超参数优化 - 网格优化方法(随机网格搜索)_网格搜索参数优化-程序员宅基地
- Lumina网络进入SDN市场-程序员宅基地
- python引用传递的区别_php传值引用的区别-程序员宅基地
- 《TCP/IP详解 卷2》 笔记: 简介_tcpip详解卷二有必要看吗-程序员宅基地
- 饺子播放器Jzvd使用过程中遇到的问题汇总-程序员宅基地
- python- flask current_app详解,与 current_app._get_current_object()的区别以及异步发送邮件实例-程序员宅基地
- 堪比ps的mac修图软件 Pixelmator Pro 2.0.6中文版 支持Silicon M1_pixelmator堆栈-程序员宅基地
- 「USACO2015」 最大流 - 树上差分_usaco 差分-程序员宅基地
- Leetcode #315: 计算右侧小于当前元素的个数_找元素右边比他小的数字-程序员宅基地
- HTTP图解读书笔记(第六章 HTTP首部)响应首部字段_web响应的首部内容-程序员宅基地